
降低智能车辆碰撞伤害的控制系统
一、成果简介
复杂行驶环境下车辆主动安全亟需进一步提升。现有智能车辆虽能够结合环境信息规划并且协调转向、驱动、制动跟踪避撞轨迹,但是随着行驶环境的复杂度增加,可行轨迹难规划,底盘作动机构特性各异,导致可行轨迹难执行。
为解决上述问题,本成果采用了车辆路径规划-跟踪一体化控制架构,实现了车辆、车轮运动状态与多特性作动控制输入间映射关系的表征,形成一体化系统预测模型。结合不同行驶车速、路面条件下的车辆运动状态变化规律,构建车辆的行驶稳定性边界,协同车辆多作动器执行能力,形成系统的约束条件。分别设计了可用于正常路径跟踪的目标函数、主动避撞的目标函数以及碰撞伤害减轻的目标函数,其中,碰撞减轻目标函数考虑了车辆间的碰撞位置、碰撞速度以及碰撞严重度等因素,基于距碰撞时间实现不同控制目标间的切换,准确优化不同行驶环境下车辆的多作动输入,保障车辆正常行驶、主动避撞、碰撞减轻多目标行驶需求,提升了智能车辆的主动安全性以及动力学性能。
该成果实现了车辆路径规划-跟踪一体化控制架构的建立,并且结合车辆间的碰撞位置、碰撞速度以及碰撞严重度等因素实现碰撞伤害减轻目标函数的构建,保障车辆能够通过优化多作动输入,提升紧急工况下智能车辆的主动安全水平。
技术优势:
①全域稳定性保障:融合车速-路面条件动态边界约束与多作动器执行能力,构建车辆路径规划-跟踪一体化控制架构,解决复杂交通场景下轨迹可行性与执行可靠性间的矛盾;
②多目标实时优化:结合车辆路径规划-跟踪一体化控制架构,实现不同控制目标下前轮转角、电机转矩、制动力矩优化分配,在≤50ms周期内满足跟踪精度、主动避撞、碰撞伤害最小化多目标需求;
③场景泛化能力:结合驾驶员在环平台以及多车试验平台完成不同路面以及行驶车辆数量等多场景验证,在保障控制鲁棒性的同时,轨迹跟踪精度提升20%,碰撞严重度下降65%。
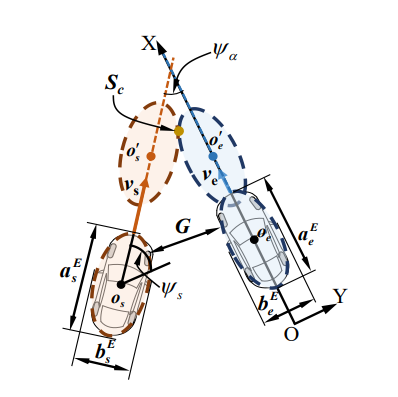
图1.车辆周向碰撞风险计算
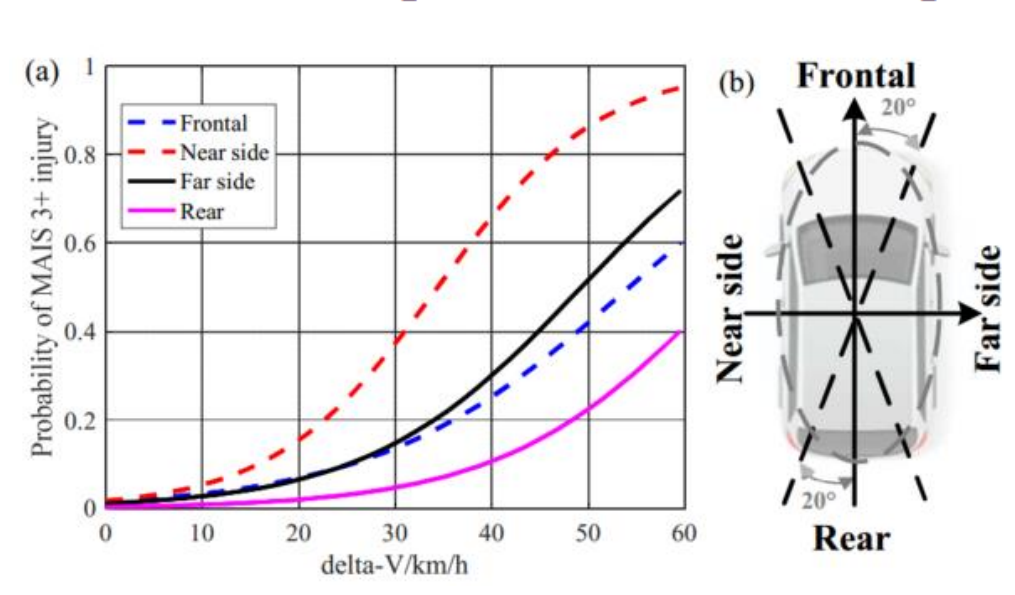
图2.车辆间碰撞严重度计算
二、应用领域
可用于无人系统主动安全防护、智能辅助驾驶等领域。
三、市场前景
现有智能车辆的先进辅助驾驶系统可以实现车辆的主动避撞,但是在复杂的紧急避撞场景下,车辆无法通过控制方向盘或者制动实现主动避撞的时候,车辆无法实现碰撞减轻。本成果不仅可以保障车辆的主动避撞,还能实现车辆在无法实现完全避撞情况下的碰撞伤害减轻,极大程度地降低碰撞带来的损伤。所建立成果无需额外的硬件,仅需软件算法升级。
适配L2+及以上智能车型,数据显示全球年销量超3500万辆(2023年),按20%渗透率测算,年市场规模20亿美元。
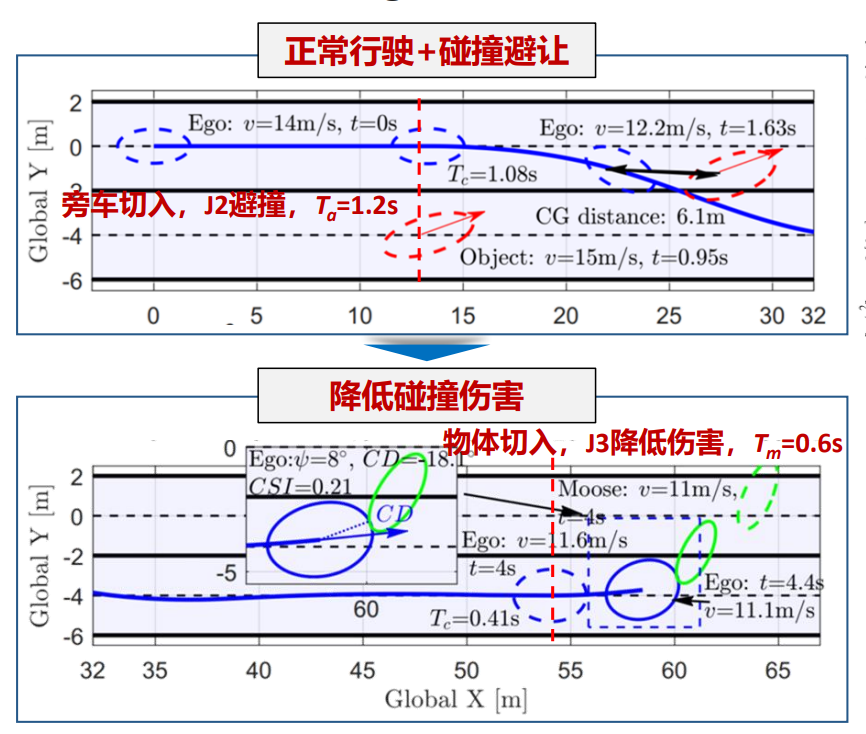
图3.车辆碰撞减轻控制结果
四、知识产权
1、成果由北京理工大学单独持有;
2、本成果已申请/授权专利5项,授权美国专利1项,PCT1项
五、合作方式
技术许可、技术转让、合作开发、技术服务和咨询等。
六、对接方式
(1)合作意向方联系北理工技术转移中心;
(2)北理工技术转移中心沟通了解意向方情况;
(3)会同成果完成团队与意向方共同研讨合作方案。
北京理工大学技术转移中心
电话:010-68914920
邮箱:bitttc@bit.edu.cn
网址:ttc.bit.edu.cn
未经授权,请勿转载